🧪 How to Simulate Bermuda (2025 Robot)
AdvantageScope
WPILib 2025
🧰 2. Clone the 2025 Robot Code
- Open WPILib 2025
- Click
Clone Git Repository
- Paste this URL:
https://github.com/Vortx3735/2025-Bot.git
- Switch to the
advantagekit branch
🎛️ 3. Setup AdvantageScope
- Set the game field to 2025 field
- (Optional) Change graphics to high quality.
- On the top menu:
Help > Show Assets Folder
- In the opened window, paste this folder:
- The folder should look like:

(You don’t need soundbyte)
▶️ 4. Start the Simulation
- Open WPILib VSCode
- Click the WPILib logo (top right)
- Select
Simulate Robot Code and check Use Sim GUI
🔌 5. Connect AdvantageScope
- Open AdvantageScope
- Top right menu:
File > Connect to Simulator
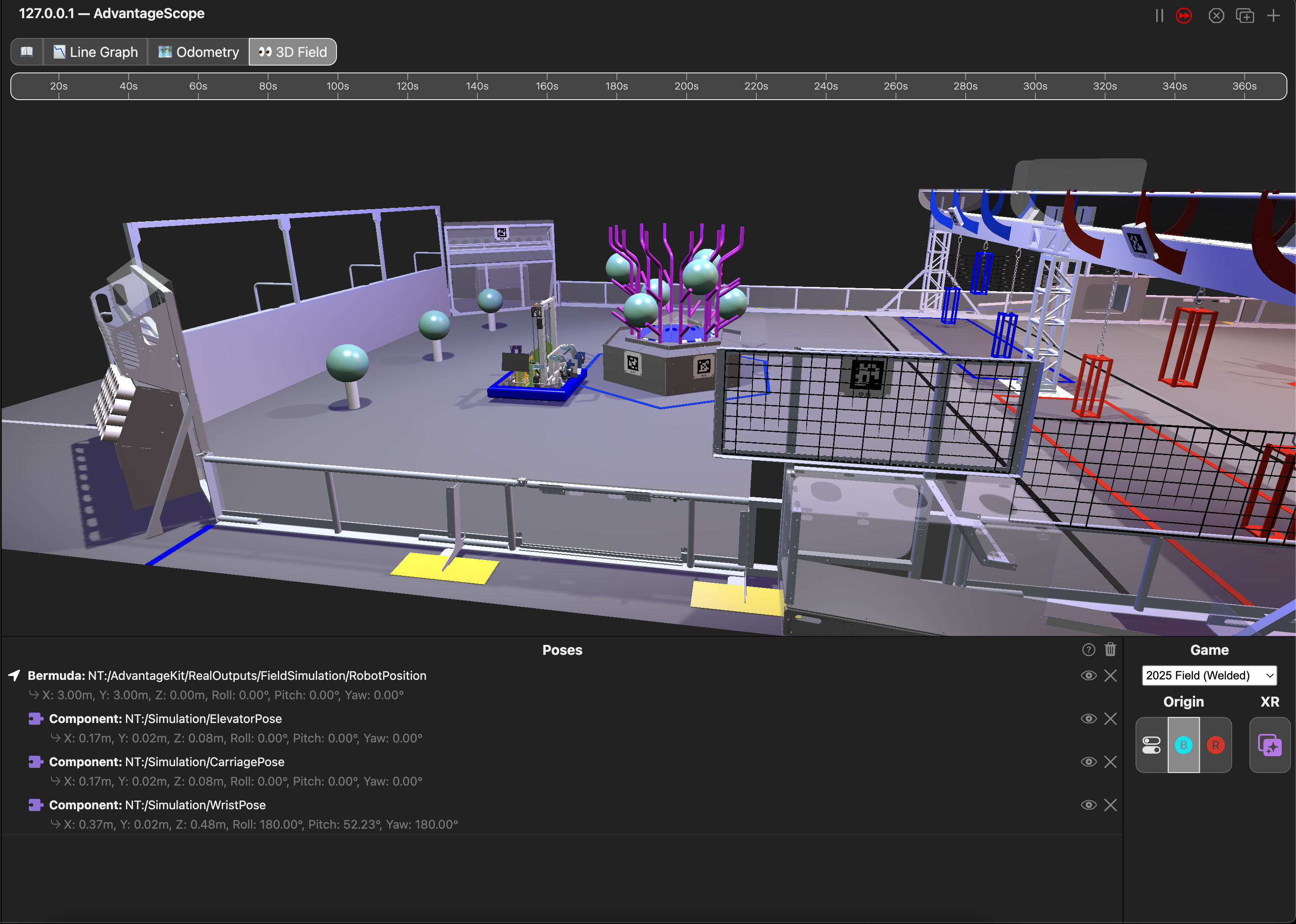
📍 6. Publish the Robot Pose
- Expand the dropdowns on the right:
AdvantageKit > RealOutputs > FieldSimulation > RobotPosition
- Drag
RobotPosition to the center panel under “Poses”

- If it says “2025 KitBot”, right-click and rename to bermuda
🏗️ 7. Add Elevator & Wrist Poses
- Under the dropdown:
simulation
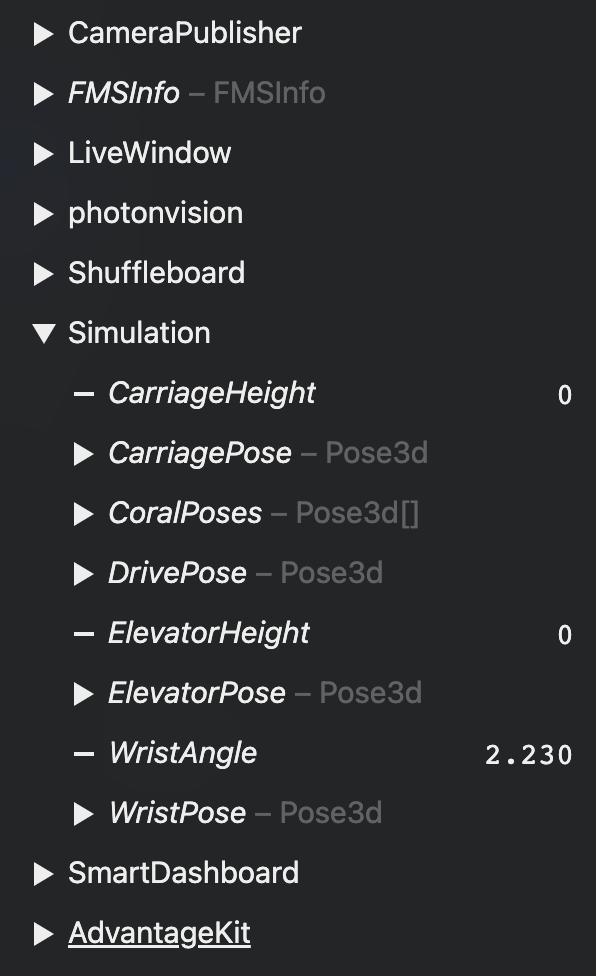
- Drag the poses in this exact order onto the robot pose:
- Elevator

- If it’s not labeled “component”, right-click →
Change to component
- Then Carriage
- Then WristPose
- Final structure should look like:
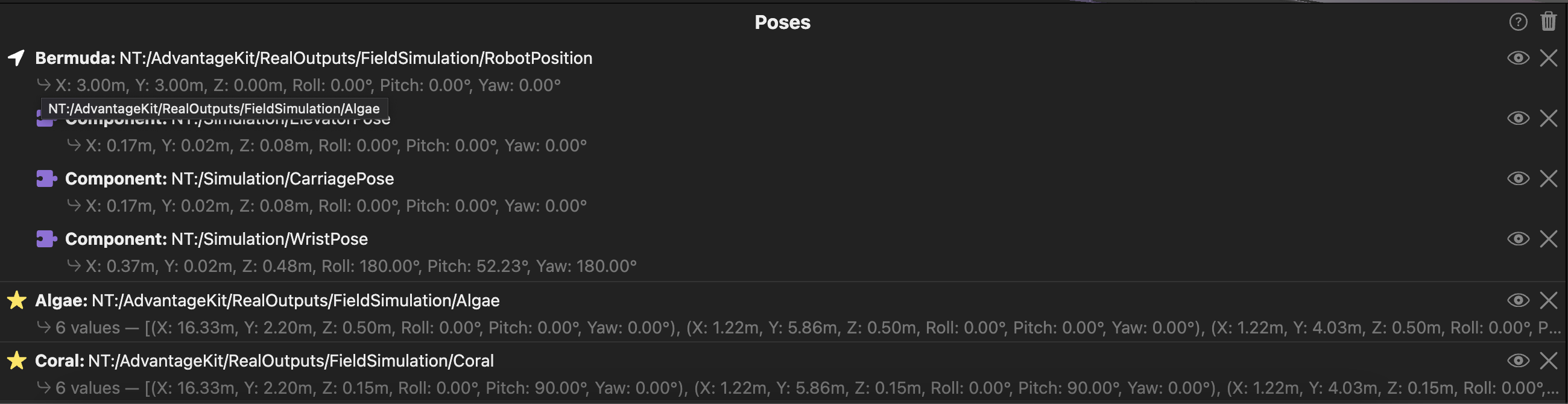
🍃 8. Add Game Pieces (Coral & Algae)
- In the dropdowns:
AdvantageKit > RealOutputs > FieldSimulation
- Drag
coral and algae to the Poses tab
- Right-click →
Change to correct game piece
🎮 9. Enable Teleop Mode in Sim GUI
- Enable Teleop
- Make sure to assign your joysticks
