Overview
Robot simulation allows programmers to work on code without needing to wait for the robot to be built. As a result of this, we can focus our energy on fine-tuning, rather than implementing code, when we actually receive the robot. In VorTX, we use a combination of the Advantagekit, Advantagescope, and Maplesim libraries to achieve a realistic, physics-based simulation of our robot (Thank you team 6328 and 5516 for publishing these awesome resources!)
Structure
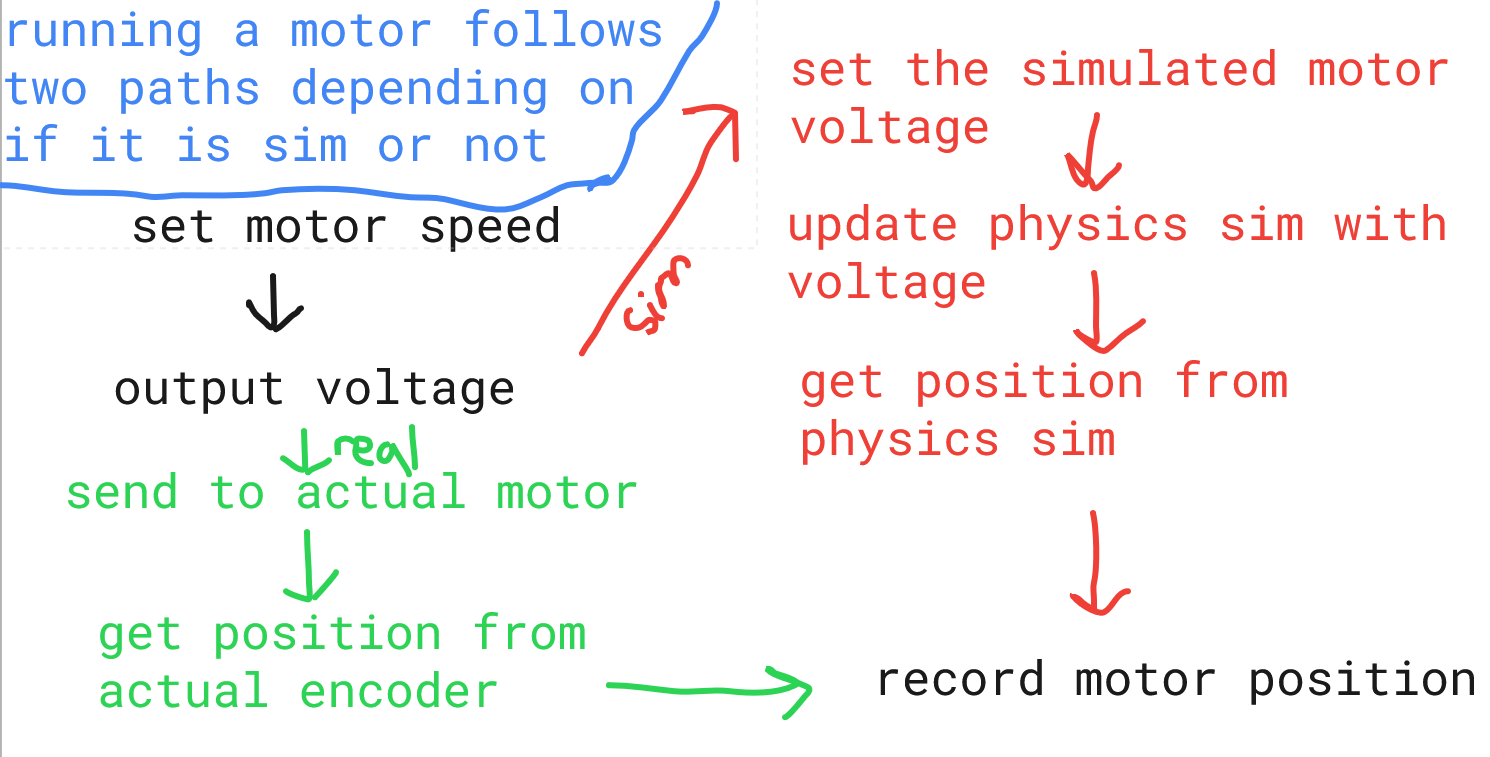
For subsystem simulation, we can usually reduce it to just simulating the motor itself. For this, refer to the image below for the simulation structure: